Touch sensitive test
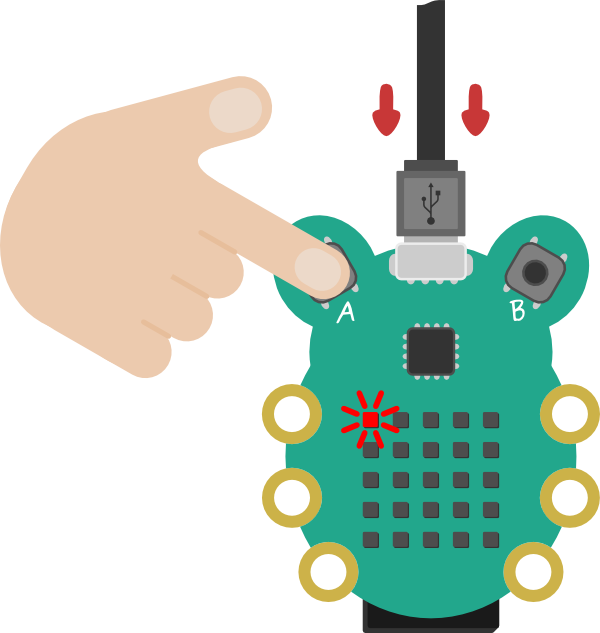
Simple test of the touch sensitive functionality. All the legs have external 330M weak pullups. Legs 0, 2, and 3 also have internal (pic based) software controlled 10K strong pullups, that are effectively in parallel with the external pullups. For the touch function to work correctly these internal pullups must be disabled. This is normally the default condition, but I have put in the code to do it anyway for completeness. I found that unless I wet my fingers to make good contact with the ground pad and the input pad the signal from the pad/leg was very unstable.